Custom Search
|
|
 
|
||
|
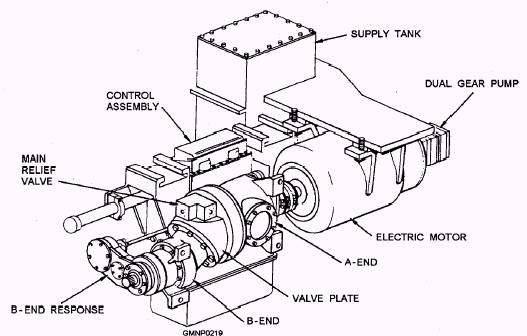
CAB TYPE OF POWER DRIVES LEARNING OBJECTIVE Identify the major components of a CAB type of power drive system used in GMLSs. In addition to the accumulator type of power drives, GMLSs also use CAB type of power drives. The main purpose of a CAB type of power drive is to produce a mechanical output. Through a drive train, this mechanical output is used to move or position various GMLS equipments. Launcher carriages, guide arms, loader chains, hoist chains, and RSRs are a few such examples. The secondary purpose of a CAB type of power drive is to provide certain hydraulic fluid outputs. These fluids are usually identified as servo fluid and supercharge fluid pressures. The application of these fluid pressures is normally limited to the CAB type of power drive that produced them. This differs from an accumulator type of power drive which produced PA. PA was distributed throughout the entire general loading system and, in some cases, to all guide arm components. A CAB type of power drive is a variable speed, bidirectional hydraulic transmission system. Its main element is a combined A-end/B-end unit or CAB unit. A hydraulic pump (A-end) is joined to a hydraulic motor (B-end) by a valve plate. Driven by a constant speed electric motor, the A-end hydraulically drives the B-end. The B-end converts fluid power into a rotary mechanical motion. The speed and direction of B-end motor rotation (output) is controlled by the A-end. In the ordnance community, there is one other version of the CAB unit. The unit is called a "Special K" type of installation. It uses one A-end to drive two B-ends. All units are separated by transmission lines. A Special K unit is used by the Mk 13 GMLS RSR/hoist power drive. The principles of operation and many of the individual components are identical among the two (CAB and Special K). We will concentrate on the CAB type of unit. A typical CAB type of power drive (fig. 4-27) includes the following major components: 1. A-end 2. B-end 3. Dual gear pump
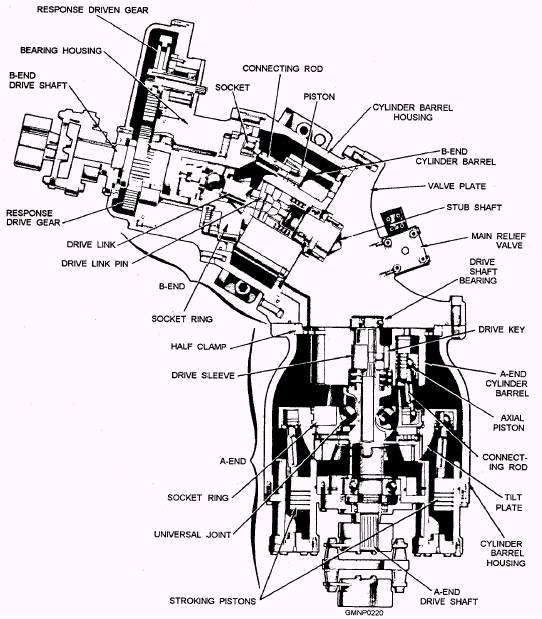
Figure 4-27.-A basic CAB type of power drive. 4. Power-off brake (not shown-see figures 4-25 and 4-26) 5. Main relief valve 6. Control assembly As we describe these components, you may find it useful to relate their operation to moving a missile launcher in train. The launcher can train in either direction (left or right) at various speeds. A-END The A-end pump of a CAB unit is very similar to a parallel (or axial) piston pump associated with an accumulator type of power drive. The main difference between the two is that the fluid output of an A-end can be varied in its volume and direction. The major components of an A-end are shown in the lower portion of figure 4-28, an A-end and B-end combination. .
Figure 4-28.-A-end and B-end combination; CAB unit.
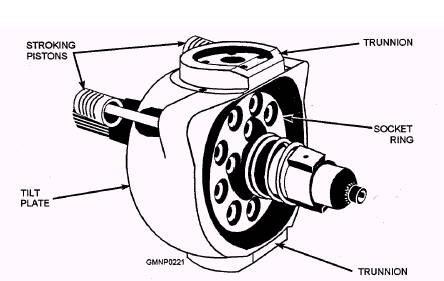
Figure 4-29.-Tilt plate, socket ring, and stroking pistons. The A-end drive shaft connects to the output shaft of an electric motor. Usually this connection is through a small reduction gear unit and a flexible coupling. The drive shaft imparts rotation to a socket ring through a universal joint. The drive shaft also rotates a cylinder barrel through a sleeve and two lock keys. A bearing in the center of the valve plate supports and holds the drive shaft in place. The socket ring has evenly spaced sockets for the connecting rods that drive the axial pistons of the A-end. The socket ring rotates within a tilt plate (fig. 4-29). The bowl-shaped tilt plate turns on two integral trunnions that ride on bearings within the A-end housing. The tilt plate does NOT rotate; however, it can be moved or positioned through a limited degree of travel by the action of the two stroking pistons. In a neutral or zero-degree position, the face of the tilt plate is parallel to the face of the valve plate. The tilt plate can be turned or "tilted" a maximum of 20 either side of ZERO position.
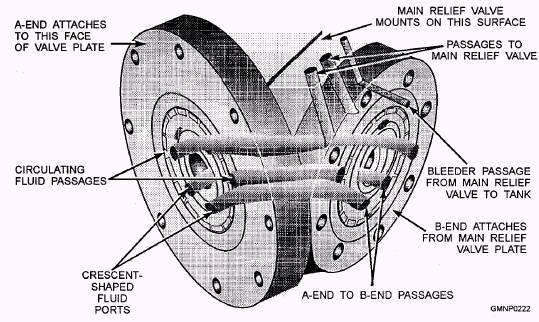
Figure 4-30.-Valve plate. The two stroking pistons operate inside separate cylinders located behind the tilt plate. Two sockets in the tilt plate housing are for the connecting rods of these pistons. The stroking pistons regulate the angle of the tilt plate anywhere between its 40-degree arc of travel. Any change in tilt plate angle is transmitted to the rotating socket ring. Changing the position of the tilt plate is commonly referred to as applying tilt to the A-end or stroking the A-end. An external control assembly varies the hydraulic fluid pressure(s) supplied to the stroking pistons to apply tilt. Some CAB units have stroking pistons that are the same size or of equal area. To apply tilt to this type of A-end, the control assembly causes hydraulic fluid pressure to increase on one of the pistons and to decrease on the other. Other CAB units have stroking pistons that are different in size. The area of one piston (the large area piston) is twice that of the other (the small area piston). In this case, the control assembly continuously applies a freed (or regulated) fluid pressure to the small area piston. It also applies a controlled fluid pressure, valued at one half of regulated fluid pressure, to the large area piston. (Remember the formula for force is area times pressure-F = AP.) To apply tilt to this type of A-end, the control assembly varies the controlled fluid pressure to the large area piston. The regulated fluid pressure applied to the small area piston remains constant. With both types of installations, the tilt plate and socket ring are made to move from their neutral positions by an unbalance of forces. The rotating cylinder barrel bears against and forms a hydraulic seal on the face of the valve plate. The barrel contains an odd number (usually nine) of evenly spaced cylinder bores. They are open on the valve plate end. Pistons in the cylinders are linked to the socket ring by connecting rods. In response to the angle of the tilt plate (and socket ring), these pistons perform the pumping action of the A-end. Hydraulic fluid is ported from the cylinder bores and into the valve plate. A small amount of hydraulic fluid is also ported through holes drilled in the pistons, their connecting rods, and socket balls. This fluid is used to lubricate the bearing surfaces in the socket ring. The valve plate (fig. 4-30) is like a hydraulic manifold with seven internal fluid passages. It connects the A-end to the B-end, both physically and hydraulically. It also mounts external components. The two main fluid passages have crescent-shaped ports on the valve plate faces (A-end and B-end). These ports separate the intake fluid from the pressurized discharge fluid. Each of these passages is joined by another fluid passage that leads to the main relief valve of the CAB unit. A small-diameter passage from the relief valve serves as a bleeder passage to the tank. The two remaining passages extend through the valve plate. They permit the free exchange or circulation of fluid between the A- and B-ends. This fluid exchange aids in dissipating heat generated within the CAB unit. The operation of an A-end can be seen in the four views of figure 4-31. Remember which components
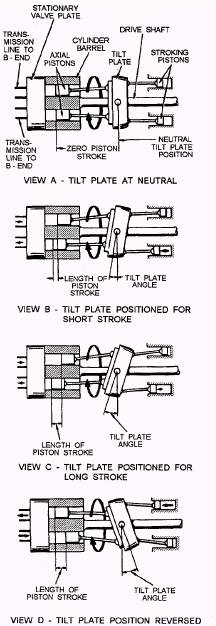
Figure 4-31.-Basic operation of the A-end. are rotating-the drive shaft, the socket ring, the connecting rods, the pistons, and the cylinder barrel. Remember what the tilt plate and stroking pistons are doing. View A shows the tilt plate of the A-end on exact neutral. While in this position, the length of every piston stroke is zero. No pumping action is taking place. If you are relating this operation to training a launcher, it is not moving since the pump of the A-end is not providing any output fluid. The fluid pressure in the two stroking piston chambers is either "equal" (if they are the same size) or "balanced" (if they are of different sizes). View B shows what happens to the components of the A-end when a small degree of tilt is applied to the tilt plate. The control assembly made the bottom stroking piston extend. The connecting rod of the stroking piston pushes the lower end of the tilt plate. The tilt plate repositions the main axial pistons. As the pistons move away from the valve plate, they draw fluid into their cylinders. Suction continues until they reach the end of their intake stroke. Meanwhile, the cylinder barrel has rotated far enough so that the pistons have passed the intake port and are approaching the discharge port. Now, because of the tilt applied, the pistons reverse and move toward the valve plate. Fluid is forced from the cylinder and through the crescent-shaped discharge port. Actually, several pistons are drawing fluid in while several pistons are discharging. This multiple-piston operation reduces pulsations in the output of the pump. In this example, our missile launcher is training slowly to the left. View C shows the A-end with the tilt plate at a greater angle. The pistons make longer strokes. Longer strokes mean a greater fluid output volume is supplied to the B-end. The missile launcher is now training faster to the left. View D shows the A-end with the tilt plate positioned in the opposite direction. Note that almost all of the components have reversed their function, The upper stroking piston now becomes the controlling piston. The intake and discharge lines have reversed. However, the electric motor keeps the drive shaft and all its driven components rotating in the same direction. Our launcher is now training to the right. |
 
|
|
|
||