Custom Search
|
|
  |
|
|
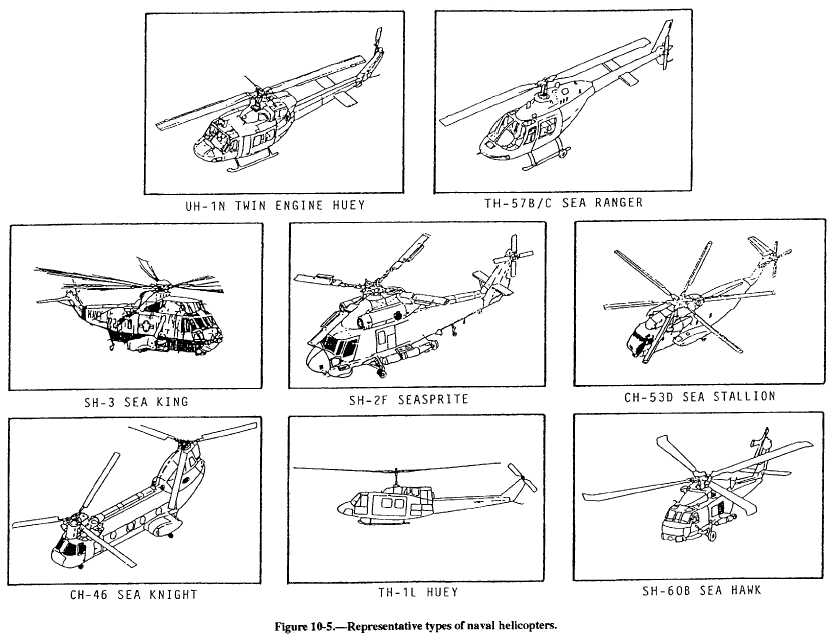
GYROSCOPIC PRECESSION The spinning main rotor of a helicopter acts like a gyroscope. It has the properties of gyroscopic action, one of which is precession. Gyroscopic precession is the resulting action occurring 90 degrees from the applied force. A downward force to the right of the disc area will cause the rotor to tilt down in front. This action is true for a right-to-left (counterclockwise) turning rotor. The cyclic control applies force to the main rotor through the swashplate.To simplify directional control, helicopters use a mechanical linkage that places cyclic pitch change 90 degrees ahead of the applied force. Moving the cyclic control forward will cause high pitch on the blades to the pilots left. At the same time, low pitch occurs on the blades to his/her right. This combina-tion of forces results in the rotor tilting down in front. If not for this offset linkage, the pilot would have to move the cyclic stick 90 degrees out of phase. In other words, the pilot would have to move the stick to the right when attempting to tilt the disc forward. He/she would move the cyclic stick forward when attempting to tilt the disc area to the left, and so on.Ground effect can be achieved when a helicopter is in a hover or forward flight while in close proximity to the ground or some other hard flat surface. When a helicopter is in a hover or moving slowly, the main rotor is developing thrust that is being vectored, or directed down toward the surface. The surface resists this airflow (thrust) by building up air pressure between the rotor and the surface, thus providing ground cushion. When the helicopter is in forward flight, the cushion is not as great as the thrust that is being vectored down and aft of the helicopter. This ground cushion will provide additional lift without additional power, and will be apparent when the helicopter is hovering or flying at an altitude of approximately one-half the main rotor diameter or below. The closer the helicopter is to the ground, the greater the cushion effect. This will be indicated by the reduced power required to maintain flight or hover. The maximum cushion effect is achieved at zero airspeed.TRANSLATIONAL LIFT As a helicopter begins the transition from a hover to forward flight, at approximately 10-15 knots, it will experience a loss of lift and settle slightly and seem to loose power, without an actual reduction in power. This is due to the loss of the ground cushion caused by the changing direction or vector of the rotors thrust. As the helicopter continues to accelerate, the rotor will be introduced to larger masses of air. The rotor will become more efficient and the thrust vector of the rotor will become more stable. Without increasing power (thrust), the helicopter will begin to climb and continue to accelerate. This changing relationship of power (thrust) available and power required is called "translational lift." The speed that a helicopter passes out of translational lift into forward flight can vary, but generally it is equal to approximately one-half the rotor diameter in knots, or approximately 25 knots for a 50-foot diameter rotor.AUTOROTATION Autorotation occurs when the main rotor rotates by air passing up through the rotor system instead of by the engine. The rotor disengages automatically from the engine during engine failure or shutdown. During autorotation, the rotor blades turn in the same direction as when engine driven. The air passes up through the rotor system instead of down. This action causes a slightly greater upward flex or coning of the blades.POWER SETTLING Stalling, as applied to fixed-wing aircraft, will not occur in helicopters. However, power settling may occur in low-speed flight. Power settling is the uncon-trollable loss of altitude. This condition may occur due to combinations of heavy gross weights, poor density conditions, and low forward speed. During low forward speed and high rates of descents, the downwash from the rotor begins to recirculate. The downwash moves up, around, and back down though the effective outer disc area. The velocit y of this recir-culating air mass may become so high that full collec-tive pitch cannot retard or control the rate of descent.TYPES OF HELICOPTERS Learning Objective: Identify the two basic types of helicopters and recognize the advantages of each.Two basic types of helicopters are the single-rotor and multirotor types. The single main rotor with a vertical or near vertical tail rotor is the most common type of helicopter. The SH-60 and SH-2, shown in figure 10-5, are examples of single-rotor helicopters.
Multirotor helicopters fall into different groups according to their rotor configuration. The CH-46, shown in figure 10-5, is a multirotor helicopter of the tandem rotor design. The single-rotor configuration requires the use of a vertical tail rotor to counteract torque and provide directional control. The advantages of this con-figuration are simplicity in design and effective directional control. In the tandem rotor design, one rotor is forward of the other. Sometimes the rotor blades are in the same plane. They may or may not intermesh. The design offers good longitudinal stability since lift occurs at two points, fore and aft. The tandem rotor has little torque to overcome because these rotors rotate in opposite directions. |
 |
|
|