Custom Search
|
|
 
|
||
|
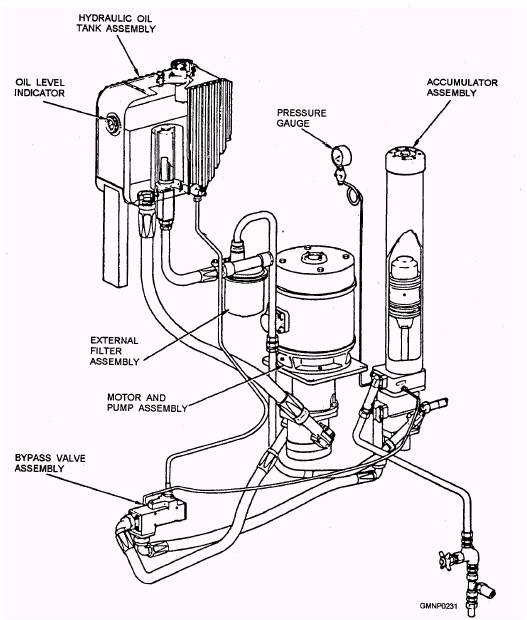
Normal Condition Operation When all system fluid pressures are available and the GMLS is ready to operate, the main relief valve assumes its normal condition (fig. 4-38). The pilot valve is set to maintain about one half of the fluid pressure of the A-end in its middle chamber. When the A-end goes tilt, high-pressure fluid from line A flows through the diagonal passage drilled in the bottom land of the pilot valve. This high-pressure fluid fills the chamber below the land and forces the plunger of the pilot valve to rise. The lower land moves over variable orifice M while the upper land moves toward variable orifice N. The plunger is now in its middle position; orifice M is not quite closed and orifice N is just barely open. Only a small amount of high-pressure fluid is allowed to escape to the tank. Very minor overpressure conditions can be relieved this way. Should a small overpressure condition occur (beyond what the pilot valve can handle), the main relief valve will unseat by a few thousandths of an inch. The small overpressure in line A is bypassed to low-pressure line B. In actuality, both the pilot and main relief valves are constantly making these minor adjustments or shifts to maintain CAB unit fluid pressures within normal limits. Excessive Fluid Pressure Condition Operation Should the A-end develop an excessive fluid pressure condition, the pressure in the lower chamber of the pilot valve increases dramatically. (Refer to fig. 4-38.) The pilot valve shifts upward, fully closing orifice M and opening orifice N. Fluid in chamber C is vented to the tank through the plunger of the pilot valve. This decreases the force or pressure holding the main valve down. The excessive fluid pressure in chamber A (or B) now offsets the force of the spring of the main valve. The plunger of the main valve lifts. This action limits pressure of the A-end in the CAB unit to a preset maximum and prevents damage to the power drive. CONTROL ASSEMBLY The control assembly of a CAB type of power drive is also known as a receiver-regulator. Basically stated, the control assembly controIs power drive operation. Figure 4-34 shows the general relationship and interactions of the control assembly with the rest of the power drive components. A control assembly is a complex arrangement of electrical, hydraulic, and mechanical components. It receives electrical signals that order the driven equipment to a new position. Components within the control assembly determine the difference between the existing (or actual) position and the ordered position. The difference (or error) is eventually transformed into hydraulic valve movements. These valve movements cause the stroking pistons to shift and apply tilt to the A-end. This drives the B-end and driven equipment to the ordered position. As the equipment moves to the new position, it is continually feeding back information to the control assembly. This feedback is known as response and involves A-end and B-end inputs. As the equipment nears the ordered position, feedback reduces the position-difference (or error) in the control assembly. Through either a decreasing electrical error signal or a mechanical limiting action, the angle of A-end tilt decreases. This action decelerates the moving equipment until it stops at the ordered position. The description of a control assembly has purposely been brief. In chapter 5, we will examine the different types of GMLS control assemblies in more detail. For now though, concentrate on the hydraulic-mechanical aspects of a CAB type of power drive, primarily the CAB unit. 76-MM 62-CALIBER GUN MOUNT MARK 75 HYDRAULIC SYSTEM LEARNING OBJECTIVE: Describe the hydraulic system and components used in the Mk 75 gun mount. The hydraulic system for this gun mount provides hydraulic pressure for operation of the ammunitionhandling system and the cold recoil jacks. The hydraulic power unit (fig. 4-39) supplies the fluid system and develops the pressure for operation of the hydraulic components in the system. The five main
Figure 4-39.-Hydraulic power unit. assemblies of the hydraulic power unit are the hydraulic oil tank, the filter, the motor and pump, the accumulator, and the bypass assemblies. |
 
|
|
|
||